Open World 3D Inspection with Mobile Robots producing High-Fidelity 3D Reconstructions (3D Gaussian Splatting)
In this project we build real world Systems for 3D Inspection with Mobile Robots producing High-Fidelity 3D Reconstructions





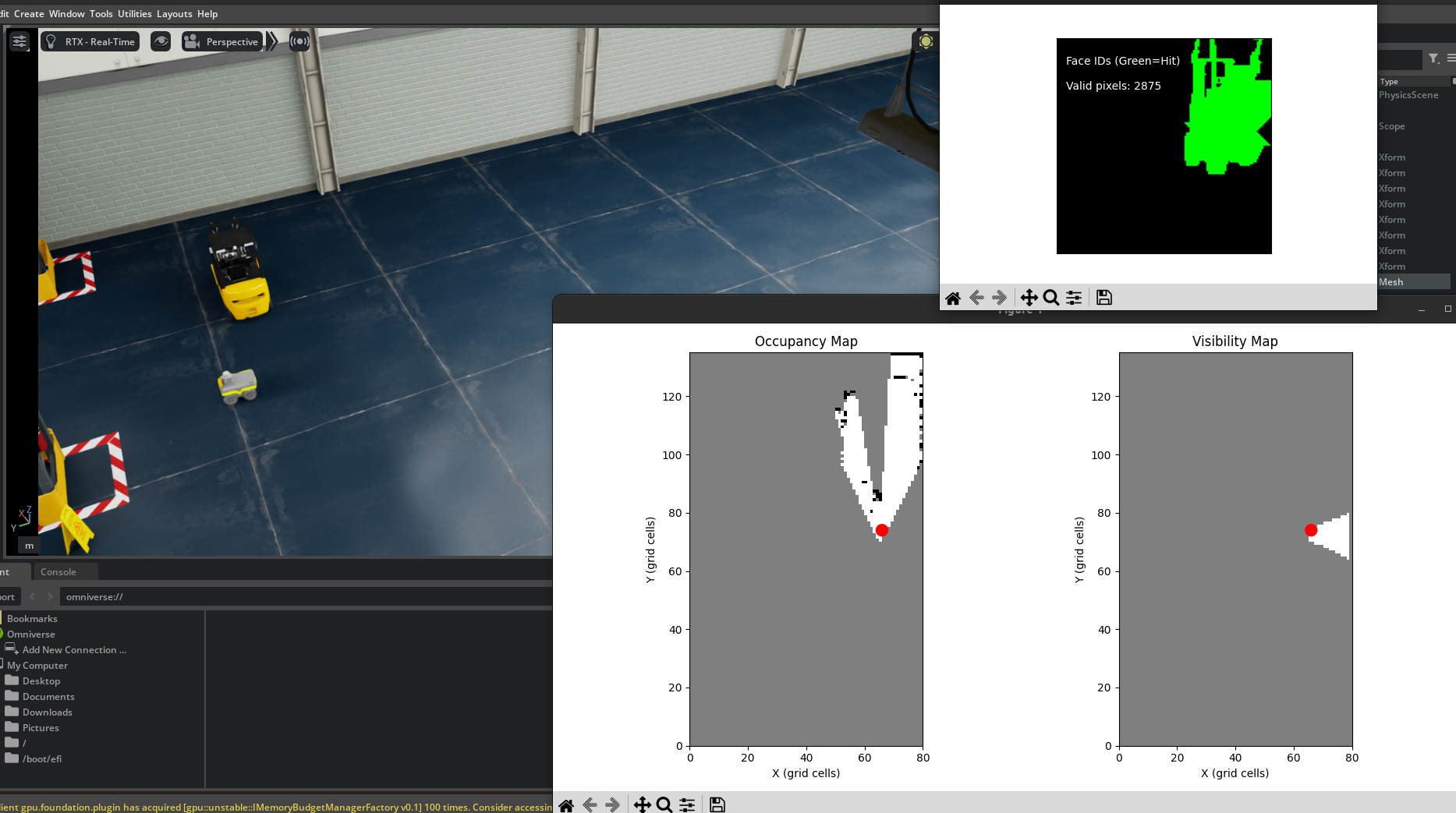
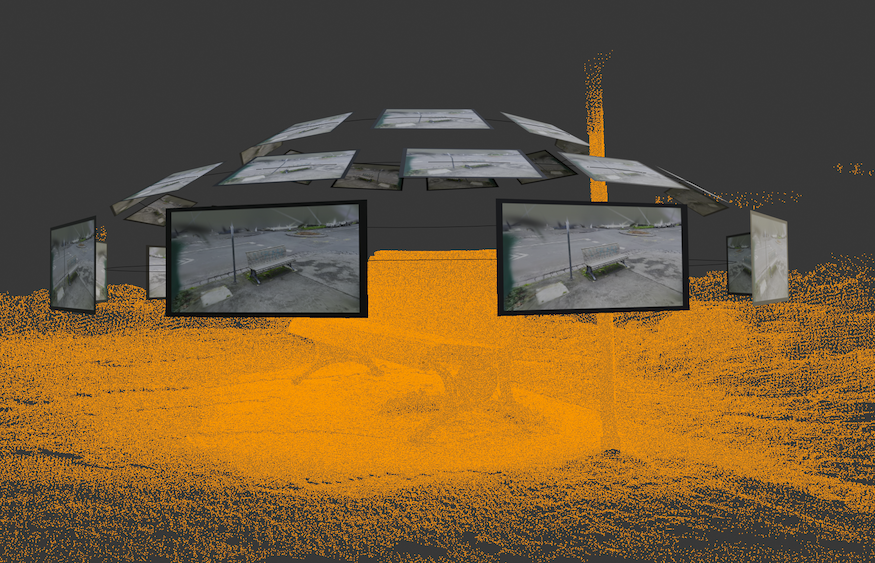
A Reinforcement Learning approach for learning joint policy for 3D Reconstruction, Inspection and Exploration
We take a learning approach to learning a policy for robot Inpsection where give a Goal a Mobile-Robot ( Jackal)must Explore an environment and produce a High-Fidelity 3D Reconstruction of the Goal Mesh.

Pan-Tilt-Zoom Sports Videography
We are developing an autonomous videography system based on a collection of pan-tilt-zoom cameras!




Safe RL (Nightmare Dreamer) - Accepted to RSS Multi Constrained Objective Workshop
Nightmare Dreamer is a sample efficient, multi-agent approach to Safe RL (Accepted to RSS Multi Constrained Objective Workshop)
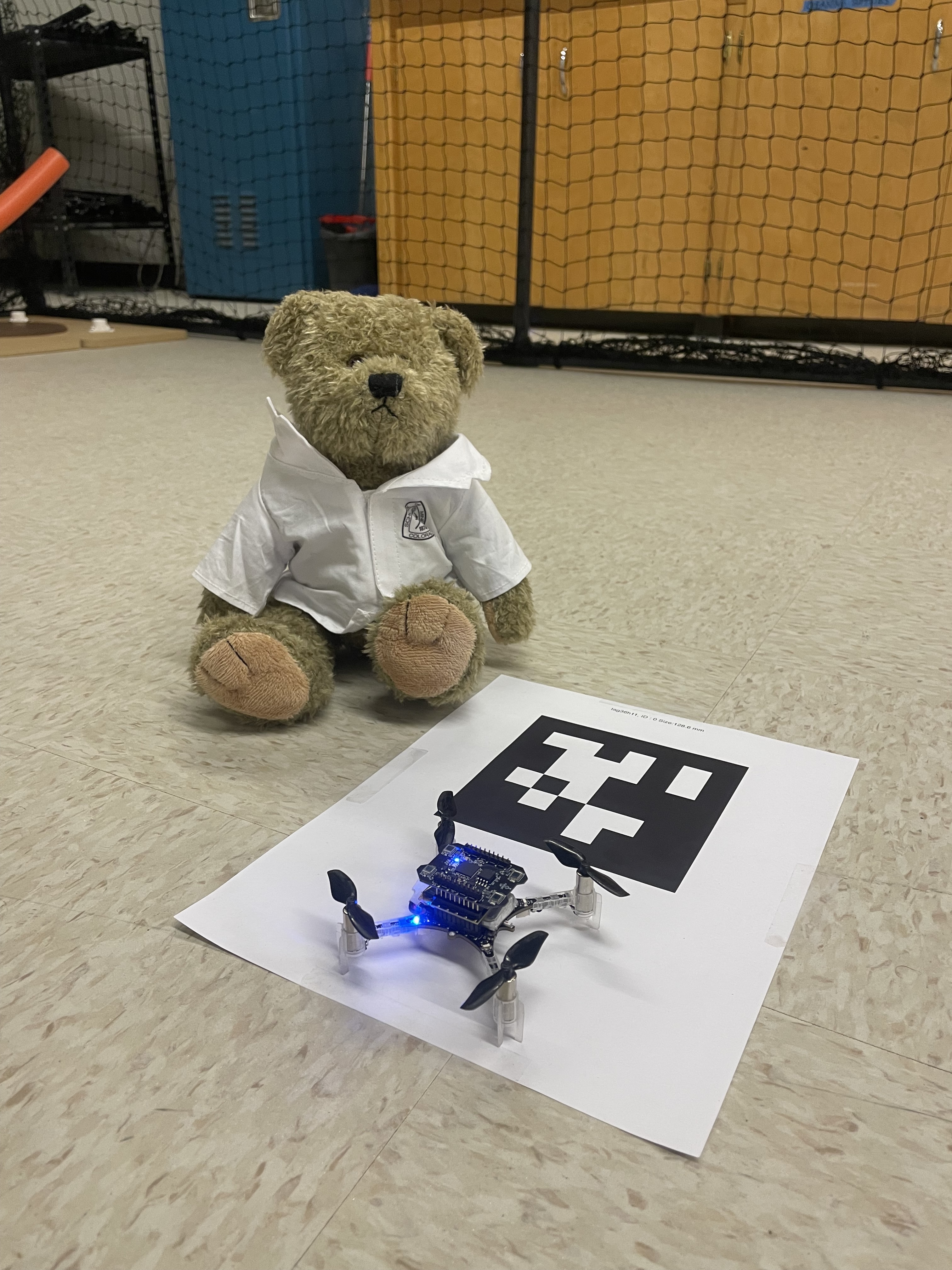
Aerial Sports Videography with Natural Language Instructions
This project aimed toward building a drone-based system for aerial videography that can be instructed purely with natural language.


![]()
![]()