A Reinforcement Learning approach for learning joint policy for 3D Reconstruction, Inspection and Exploration
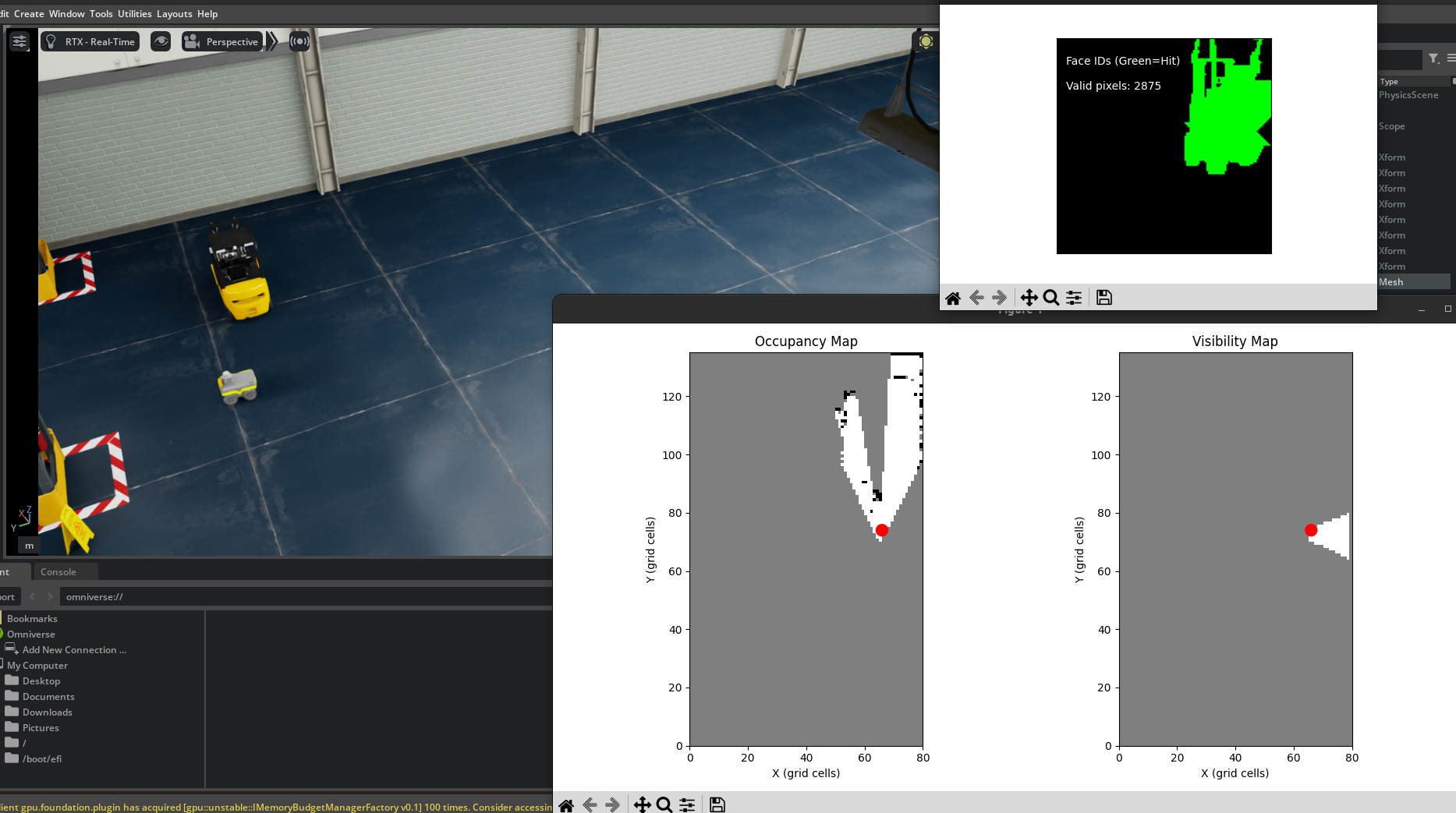
We take a learning approach to developing a policy for robot inspection, where given a goal, a mobile robot (Jackal) must explore an environment and produce a high-fidelity 3D reconstruction of the goal mesh. The Jackal is fitted with a front depth camera and an inspection camera. The inspection camera is a PTZ camera, allowing it to actuate, rotate at its base, tilt vertically, and zoom, giving the inspection camera more control over acquiring more detailed reconstructions. We design a joint reward function for Surface Coverage as well as Map Exploration. Map exploration is a combination of Information gain of the Occupancy map gained from the depth camera and to ensure the Inspection camera stumbles on observing the Goal mesh we also include a reward gain for the Inspection camera covering the Map. 3D Point cloud of the Goal Mesh is acquired from the Inspection camera and is used for 3D reconstruction and a sparse reward quantifying the quality of the reconstruction is given at the end of the trajectory such as chamfer distance or surface coverage.
Simulation is done in Isaac SIM/LAB.
People


Dr Micah Corah
Interests: Aerial robotics, Active perception, and multi-robot systems with applications to aerial videography

Noah Chapman
Interests: Robot Perception, Computer Vision, Machine Learning, and Mechatronics Current Position: Developer
![]()
![]()