Navigation, Aerial-robots, and Perception Planning Lab (NappLab)
The NAPPLab is a research group at Colorado School of Mines in the Computer Science Department. Our research is at the intersection of aerial robotics, active perception, and multi-robot systems, and our work has applications to aerial videography, infrastructure inspection, and physical search (mine safety, search and rescue).
Join Us!Projects
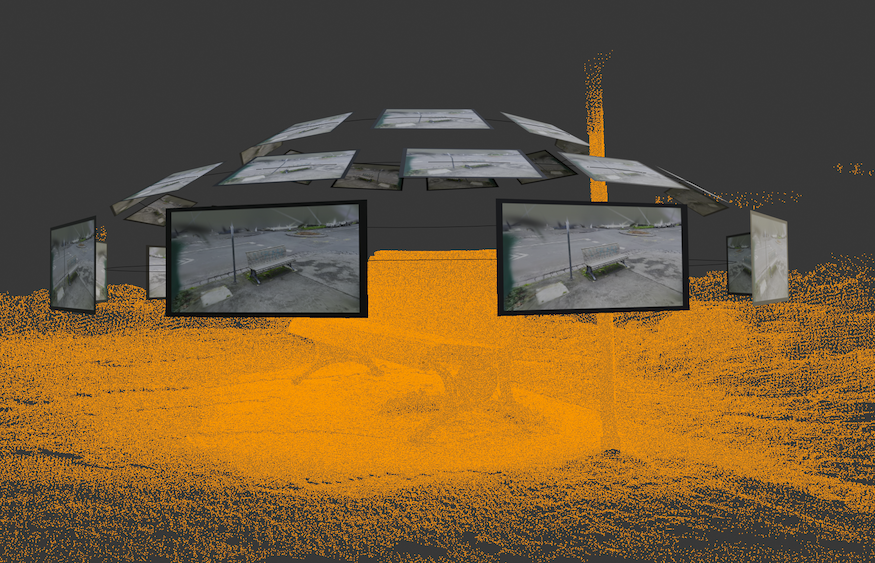
Open World 3D Inspection with Mobile Robots producing High-Fidelity 3D Reconstructions (3D Gaussian Splatting)
In this project we build real world Systems for 3D Inspection with Mobile Robots producing High-Fidelity 3D Reconstructions





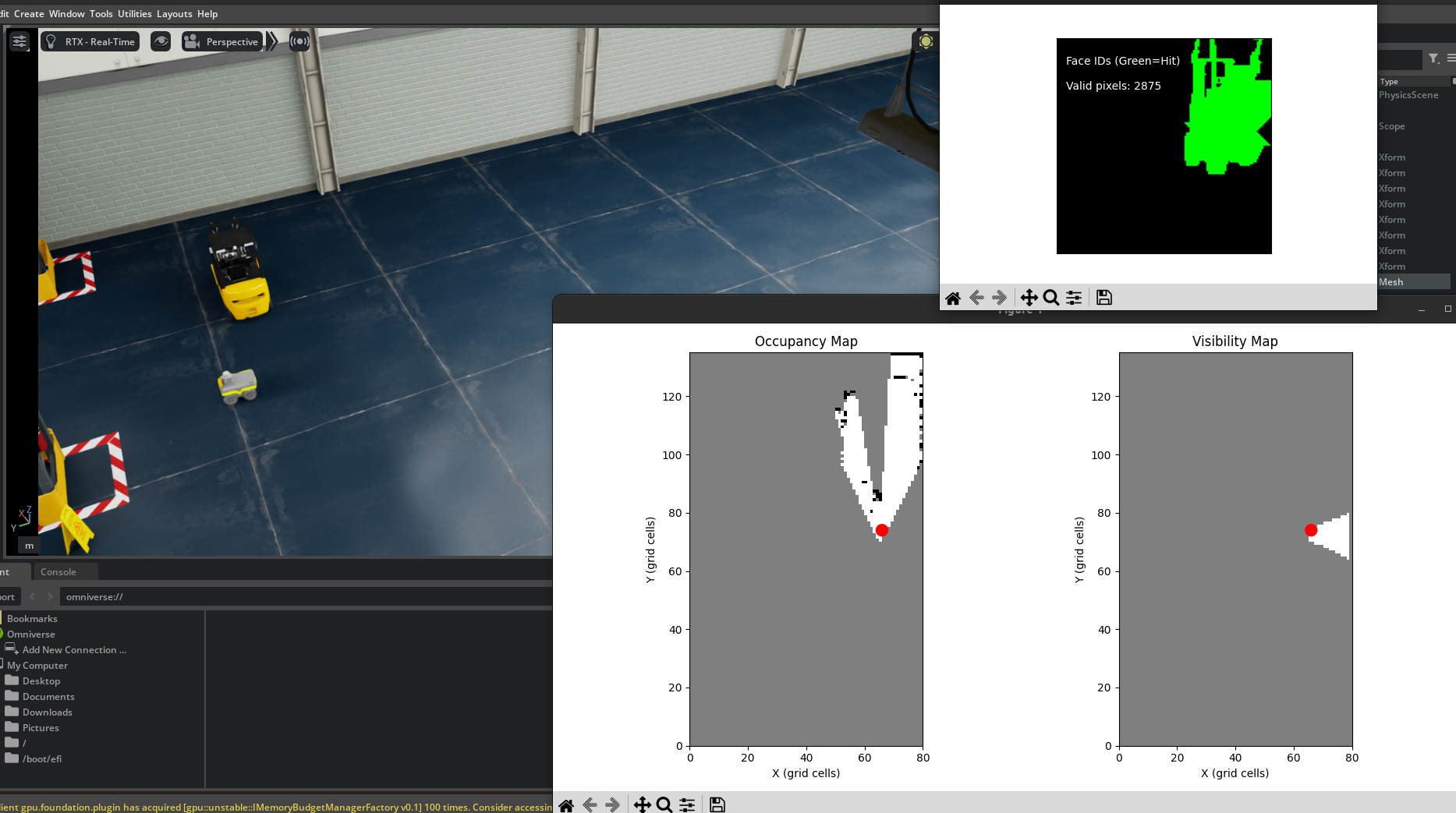
A Reinforcement Learning approach for learning joint policy for 3D Reconstruction, Inspection and Exploration
We take a learning approach to learning a policy for robot Inpsection where give a Goal a Mobile-Robot ( Jackal)must Explore an environment and produce a High-Fidelity 3D Reconstruction of the Goal Mesh.

Pan-Tilt-Zoom Sports Videography
We are developing an autonomous videography system based on a collection of pan-tilt-zoom cameras!




Safe RL (Nightmare Dreamer) - Accepted to RSS Multi Constrained Objective Workshop
Nightmare Dreamer is a sample efficient, multi-agent approach to Safe RL (Accepted to RSS Multi Constrained Objective Workshop)
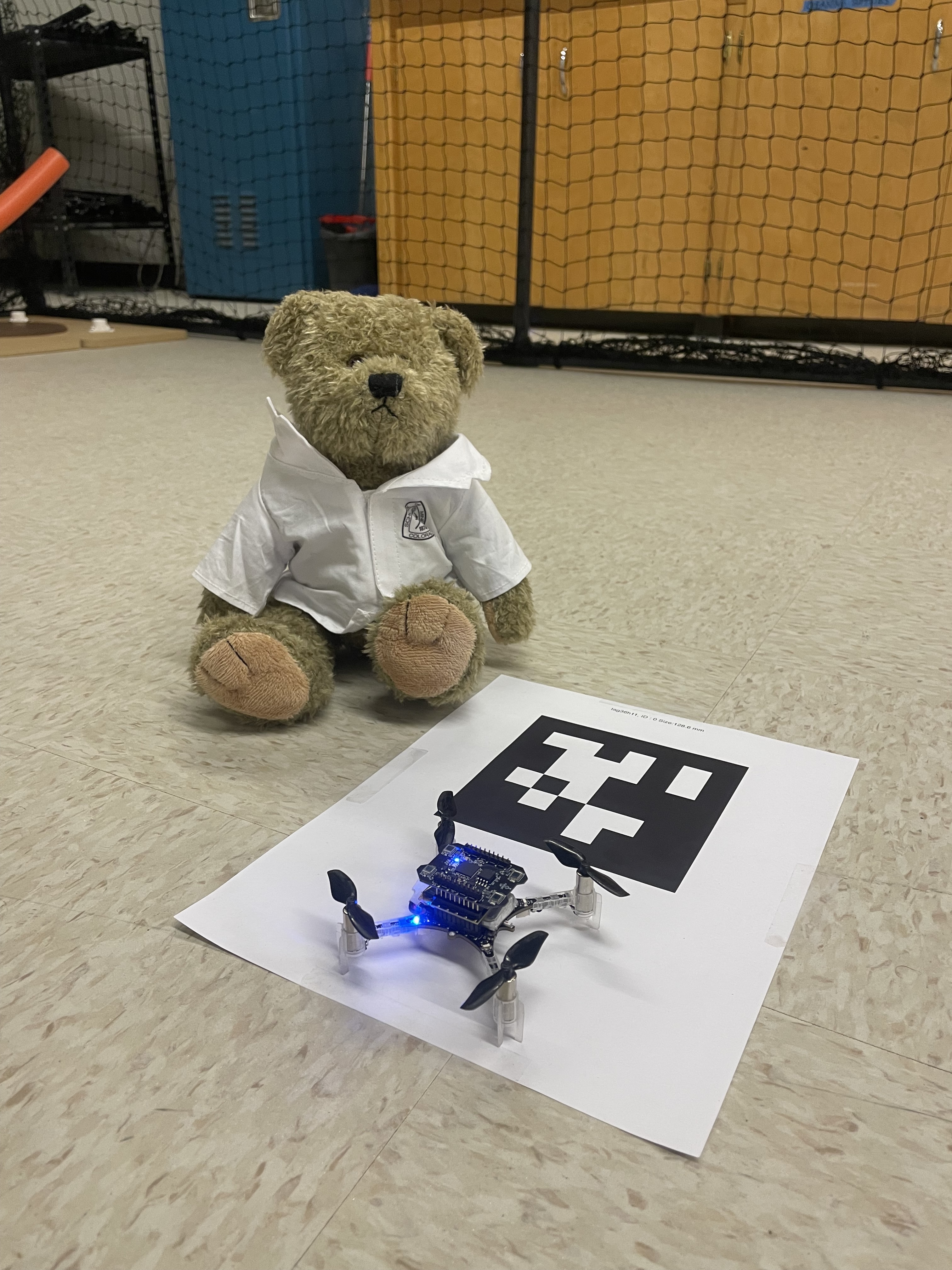
Aerial Sports Videography with Natural Language Instructions
This project aimed toward building a drone-based system for aerial videography that can be instructed purely with natural language.


![]()
![]()